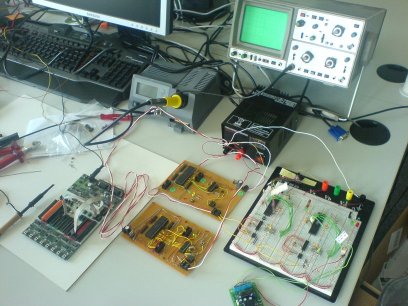
Nach der Entwicklung der CAN-Controller, wird jetzt als nächster Schritt das Bauen der Prototypen angegangen. An ihnen kann man das erste Mal testen, wie sich mehrere CAN-Controller an einem Bus verhalten. Erwartungsgemäß funktioniert der CAN-Bus mit mehreren Teilnehmern gemäß Spezifikation. Auch das Flashen einer neuen Firmware funktioniert einwandfrei. Dabei wird ein Bootloader verwendet, der die Firmware über den CAN-Bus entgegennimmt.
Auf dem Bild kann man vier CAN-Teilnehmer erkennen. Man kann inzwischen auch von den itemis Hardware Labs Lünen sprechen.
Als nächster Schritt wird ein Platinen-Layout entwickelt, um die endgültigen CAN-Controller zu erhalten. Desweiteren werden jetzt die Schaltungen für die Leistungselektronik entwickelt. Schließlich sollen die CAN-Controller ja eine Modellbahn steuern.
Sorry, the comment form is closed at this time.